
【产品简介】
国内首个AI赋能平台X-Trainer,以高性能协作机器人为基石,率先实现机器人与人工智能的融合应用并完成了商业化。“AI+机械臂”在实践中被证明是最优“具身智能体”,它解锁了机器人的自主操作能力,基于稳定流畅的操作,突破了协作机器人产品与感知融合、深度学习、大数据等技术的融合应用,通过“模仿学习策略”提升机器人的自主学习和运行效能,实现了视觉、听觉、思考与行动的高度一体化融合,赋予了AI协作机器人“高层次”的智能水平。这一进步正加速推动“具身智能体”在工业制造、商业服务等广泛领域的实际应用,让机器人能够更加高效、精准地完成多样化任务,迈向高阶智能化阶段。
【产品特点】
快速训练 无惧干扰
模仿学习数据训练时长大幅缩短70%,常规场景训练(如刷盘子、叠衣服)仅需 2 小时即可完成。在自主执行场景任务时,可对实时干扰快速纠正,如机器人可识刷盘子过程中增加的污渍并完成清洁,使机器人 AI 水平大幅提升。
便捷训练 探索未来
采用遥操录入方式,配备数据训练平台并开放 API接口,支持导出专用格式数据供具身智能神经网络模型直接使用,亦可自行部署多模态大模型进行数据训练与研究,助力各类科研项目高效开展。
工业性能 前所未有
搭载六轴协作机器人 Nova,重复定位精度高达 0.05mm使 AI训练机器人首次拥有工业级数据采集与动作精度。采用25Hz 端到端高性能运动接口,响应速度较同类产品提升150%,机器人运行平稳性更进一步。
强大舵机 遥操随心
采用轻量化设计,操作时人手负载小于 400 克,使用更轻便。配备高性能伺服舵机,动作采集精度更高,遥操作更贴手。主手采用人体工学设计,构型与从手一致,经缩放优化后操作更为灵巧轻松执行各类复杂、精细任务。
快捷按钮 高效控制
主手操作手柄增配解锁键与录制键,解锁键可快速实现主手姿态锁定及解锁操作,显著减轻操作人员双手疲劳;录制键可快捷控制录制开始或结束,数据采集节点控制更为精准。
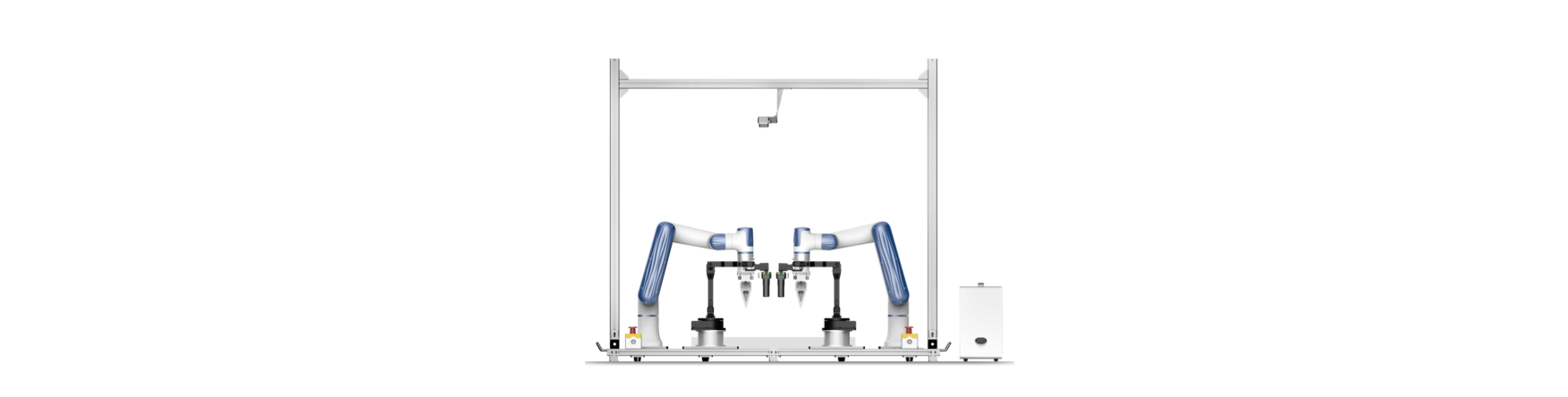
一体底座 部署便捷
主从手机械臂集成于一体化底座平台,稳定可靠,极大提升了设备的灵活性和使用的便捷性,可在不同环境下部署和使用,满足科研、教育和工业等多种场景的需求。
【配置清单】

| 【产品参数】 | |
| 主手 | |
| 参数项 | 参数值 |
| 本体重量 | 1 Kg |
| 自由度 | 6 |
| 最大工作半径 | 437 mm |
| 电机 | 高性能伺服舵机 |
| 按键 | 解锁按键, 录制按键 |
| 底座尺寸 | 149 × 130 × 58 mm |
| 电源输入 | 100V~240V AC, 50/60 Hz |
| 额定电压 | DC 12V 2A |
| 通信接口 | USB |
| 材料 | 金属件+3D打印(塑胶) |
| 工作环境 | 温度: 0℃ ~ 40℃ |
| 湿度: 25%~85%, 非冷凝 | |
| 固定底座 | |
| 参数项 | 参数值 |
| 本体重量 | 290 Kg |
| 尺寸 | 发货尺寸(不安装相机支架): |
| 1500 × 1100 × 820 mm | |
| 正常使用尺寸(安装相机支架): | |
| 1400 × 1000 × 1960 mm | |
| 电源输入 | 100V~240V AC, 50/60 Hz |
| 额定功率 | 150W |
| 对外供电 | DC 24V*6 个,单口最大 4A, 总共输出 4A |
| 通信接口 | Ethernet |
| 通信方式 | TCP/IP |
| 指示灯 | 三色指示灯*1 |
| 急停开关 | 全局急停*2 |
| 材质 | 铝合金+金属 |
| Nova 2 从手夹爪 | |
| 参数项 | 参数值 |
| 本体重量 | 0.6 Kg (含相机和支架) |
| 最大开合距离 | 95 mm |
| 支持力 | 0-15N |
| 材料 | 3D 打印 (塑胶) |
| 尺寸 | 160 × 202 × 75 mm |
| 工作环境 | 温度: 0℃ ~ 40℃ |
| 湿度: 25%~85%, 非冷凝 | |
| Nova2 | |
| 参数项 | 参数值 |
| 本体重量 | 11 Kg |
| 自由度 | 6 |
| 额定负载 | 2 Kg |
| 重复定位精度 | 0.05 mm |
| 最大工作半径 | 625 mm |
| 工作环境 | 温度: 0℃ ~ 40℃ |
| 湿度: 25%~85%, 非冷凝 | |
| 额定功率 | 最大 250W |
| 相机 | |
| 参数项 | 参数值 |
| 型号 | 深度相机 |
| 尺寸 | 36.5 × 19.4 × 10.5 mm (模块) |
| 深度 | FOV: 87° × 58° |
| 深度输出分辨率: 高达 1280 × 720 | |
| 通信接口 | USB 2、USB 3.1 |
| 工作环境 | 0 至 35℃ (环境) |
| 0 至 55℃ (外壳) | |

 鄂公网安备42011502001751
鄂ICP备2024079111号XML地图
鄂公网安备42011502001751
鄂ICP备2024079111号XML地图 
 微信二维码
微信二维码